











Flache Kaliber, raffinierte Werkarchitektur: Aktuelle Uhren mit Mikrorotor von Bulgari, Chopard, Patek Philippe & Co. - spannendsten Neuheiten 2026.


Der Mikrorotor gilt als die eleganteste Form des automatischen Aufzugs – und zugleich als technischer Kompromiss. Seit dem Ende der 1950er-Jahre ermöglicht seine integrierte Konstruktion flachere Kaliber und einen freieren Blick auf das Uhrwerk. Ob Patek Philippe, Chopard oder Bulgari – zahlreiche Uhrenmanufakturen setzen derzeit verstärkt auf den Mikrorotor. Grund für einen analytischen Blick auf das kleine Kraftpaket im Automatikwerk.
Die Erfindung des Automatikwerks war ein Meilenstein in der Geschichte der Uhrmacherei. Bis heute umgibt es die Aura eines Perpetuum Mobiles, das – einmal gestartet – läuft und läuft und läuft. Ohne weitere Energiezufuhr von außen. Das stimmt natürlich nicht.
Stattdessen sorgt kinetische Energie – durch die Handgelenksbewegung des Trägers oder einen Uhrenbeweger – dafür, dass der aufziehende Rotor die Bewegungsenergie in der Feder speichert. Hemmung und Unruh ermöglichen derweil die kontrollierte Abgabe an das Räderwerk, welches die Zeiger und weitere Funktionen antreibt und mit Energie versorgt.
Der aufziehende Rotor kann verschiedene Formen annehmen, auch wenn er nach dem immer gleichen Prinzip funktioniert: Übertragung von Bewegungsenergie auf die Zugfeder im Federhaus.
Am wohl häufigsten ist der große Zentralrotor im Einsatz, welcher frei oberhalb des Werkes dreht. Der ins Werk integrierte Mikrorotor kam in den 1950er-Jahren hinzu und erfreut sich aktuell großer Beliebtheit.
In puncto Größe, Effizienz und freie Sicht auf das Werk lässt sich der Dreiviertelrotor zwischen diesen beiden Varianten einordnen.
Und dann gibt es noch den peripheren Rotor. Dabei rotiert ein ringförmiges Gewicht am äußeren Rand des Werks und bietet vollends ungehinderte Sicht auf das Uhrwerk. Er hat zudem ein hohes Trägheitsmoment, sprich eine hohe Effizienz. Dennoch kommt er eher selten zum Einsatz, da periphere Rotoren schwierig zu bauen sind. Er läuft quasi wie ein Ring auf einer Schiene. Daher muss die Lagerung extrem präzise sein und der Ring sehr stabil geführt werden, um zu viel Reibung zu verhindern. Kleine Toleranzfehler können bereits zu relevanten Problemen führen.
Bereits Ende des 18. Jahrhunderts beschäftigten sich Uhrmacher wie Louis Perrelet (1729-1826) und Abraham Louis Breguet (1747-1823) mit automatisch aufziehenden Taschenuhren, diese blieben jedoch eher raffinierte Sonderfälle. Möglicherweise aufgrund der Tatsache, dass eine in der Westen- oder Hosentasche geführte Taschenuhr häufig nur wenige Bewegungsimpulse erhält und der automatische Aufzug daher nur bedingt effizient ist. Zudem nimmt man eine Taschenuhr ohnehin mehrmals am Tag in die Hand, um die Uhrzeit abzulesen. Der Aufzug per Hand kann sozusagen nebenbei erledigt werden.
Credit © Perrelet
Anders eine Armbanduhr. Je nach Tätigkeit bewegt der Mensch den linken Arm bis zu zehntausende Male pro Tag. Außerdem legt man eine Armbanduhr selten ab, viele auch nachts nicht. Während eine Handaufzugsuhr regelmäßig zur Energienachversorgung abgenommen werden muss, läuft die getragene Automatikuhr praktischerweise einfach immer weiter.
Uhrmacher John Harwood (1893-1965) und Harry Cuts als sein Finanzier meldeten 1923 in der Schweiz die Erfindung einer Armbanduhr mit automatischem Aufzug zum Patent an, das ihnen am 1. September 1924 unter der Nummer 106583 erteilt wurde.
Credit @ The British Museum
Obwohl auch andere Uhrmacher in jener Zeit automatische Werke mit verschiedensten Aufzugssystemen für Armbanduhren entwickelten, gilt das Konzept von Harwood als Grundlage der weltweiten Erfolgsgeschichte der automatischen Armbanduhr: die Lagerung der Schwungmasse in Form eines Kreissegments in der Mitte des Werks. Dieses schwang bei der Harwood-Konstruktion durch die Armbewegung nach links und rechts und übertrug die Bewegungsenergie auf die Zugfeder. Am Ende des Bewegungswegs traf es auf kleine Federn oder Puffer, die Bumper.
Rolex kommt in der folgenden rasanten Karriere des Automatikwerks eine besondere Rolle zu. Die Marke entwickelte Harwoods Bumper-Prinzip weiter und führte 1931 einen frei rotierenden Rotor ein, der sich um 360 Grad drehen konnte und dadurch effizienter aufzog. Dieses patentierte System nannte Rolex Perpetual Rotor. Der Rotor moderner Automatikuhren basiert bis heute grundsätzlich auf diesem Prinzip.
Der allgemeine Durchbruch der Automatik-Armbanduhren verortet man heute ab den späten 1940er- beziehungsweise frühen 1950er-Jahren. Hunderte Patentanträge innerhalb weniger Jahre kennzeichnen diese Periode und die Suche nach dem optimalen Automatikaufzug.
Immer im Fokus dabei: der Rotor. Genauer gesagt: der Zentralrotor. Denn bei aller Effizienz stand er dem zunehmenden Wunsch nach flacheren und eleganteren Uhren im Weg, da er auf das eigentliche Kaliber aufgesetzt wird. Die Lösung: der integrierte Mikrorotor.
Ab Ende der 1950er-Jahre hält der Mikrorotor Einzug in die automatische Armbanduhren-Welt. Während der klassische Zentralrotor einen großen Schwingkreis benötigt, der oberhalb des Basiswerkes eine zweite Funktionsebene erfordert, wird der Mikrorotor in das eigentliche Uhrwerk integriert.
In Zeiten der Glasböden erlaubt er zudem den freien Blick auf einen Großteil des Werkes, während ein Zentralrotor dieses zu großen Teilen verdeckt. Es sei denn er ist offen gearbeitet.
Für alle Varianten gilt: Sie müssen ein möglichst hohes Gewicht sowie eine freie und leichte Beweglichkeit haben und gegen Stöße unempfindlich gelagert sein.
Mit einer einfachen Miniaturisierung des Rotors ist es aber nicht getan. Denn abgesehen davon, dass für die Verlagerung in das Werk dort erst einmal Platz geschaffen werden muss, stellt ein Prinzip der Mechanik die größte Herausforderung für eine Mikro-Schwungmasse dar: das Trägheitsmoment. Je höher dieses ist, umso effizienter ist die Drehbewegung des Rotors eines Automatikwerkes.

Die Schweizer Manufaktur Parmigiani Fleurier setzt häufig Mikrorotoren ein, und betont die höhere konstruktive Komplexität: „Der reduzierte Rotordurchmesser erfordert eine präzise Abstimmung von Massenträgheit, Aufzugswirkungsgrad und Energiefluss im gesamten Automatikmodul, um eine mit Zentralrotorsystemen vergleichbare Effizienz und Alltagstauglichkeit sicherzustellen.“
Der Knackpunkt ist das Trägheitsmoment. Dieses steigt mit zunehmenden Trägheitsradius, also der Entfernung zwischen Drehachse und Masse. Das bedeutet: je größer der Rotor, umso höher die Effizienz. Um dies bei der Reduktion der Größe auszugleichen, wird möglichst viel Masse am äußeren Rand konzentriert. Daher sind Mikrorotoren oftmals mit einem schweren Außenring versehen, zum Beispiel aus Gold, Platin oder Wolfram.
Letzteres ist ein entscheidender Vorteil moderner Mikrorotor-Systeme gegenüber ihren historischen Vorläufern, wie Parmigiani Fleurier erläutert:
„Der Fortschritt besteht in der Verwendung hochdichter Materialien wie Platin oder Goldlegierungen, die trotz kompakter Abmessungen eine höhere Trägheit ermöglichen und so den Aufzug deutlich effizienter gestalten. Hinzu kommen optimierte Lager- und Rotor-Geometrien sowie eine konsequente Reduktion von Reibungsverlusten im gesamten Automatikmodul. Gleichzeitig erlauben moderne Werkarchitekturen eine wesentlich integriertere Bauweise, wodurch extrem flache Kaliber realisiert werden können, während die Energieeffizienz im Vergleich zu früheren Konstruktionen deutlich stabilisiert und verbessert wurde – allerdings stets im Rahmen der physikalischen Grenzen dieses Systems.“
Ein Mikrorotor ist ein Kompromiss zwischen Bauhöhe und physikalischer Effizienz, so die gängige Auffassung. Doch was bedeutet Effizienz in diesem Zusammenhang eigentlich? Kurz gesagt: ein Zentralrotor spannt die Zugfeder einer Automatikuhr schneller als ein Mikrorotor.
Das kann sich auf die tatsächlich erreichte Gangreserve auswirken. Nimmt man zwei Uhren mit maximaler, theoretischer Gangreserve von 70 Stunden, von denen die eine einen sehr effizienten, die andere einen weniger effizienten Rotor hat, dann gilt: Die erste Uhr wird beim normalen Tragen schnell voll aufgezogen, während die andere möglicherweise nie die volle Spannung der Feder und somit die maximale Gangreserve erreicht.
Gerade bei Uhren mit hoher Frequenz kann ein Zentralrotor mit Blick auf die Gangreserve also durchaus von Vorteil sein. Der Effizienz-Unterschied zwischen Zentralrotor und modernem Mikrorotor schrumpft aber zusehends. Denn die Werkespezialisten arbeiten kontinuierlich an der Optimierung des Aufzugswirkungsgrades. Dabei geht es um die Abstimmung von Rotorgeometrie, Lagertechnik und Reibungsminimierung innerhalb des Automatikmoduls, um die physikalisch bedingten Grenzen kompakter Schwungmassen bestmöglich zu kompensieren.
Es gibt auch Uhrenmarken, die sich bewusst gegen einen Mikrorotor entscheiden. Dazu gehört Nomos Glashütte. Mirko Heyne, Leiter Forschung & Entwicklung, erklärt dies so:
„Mikrorotoren ermöglichen neben flachen Bauweisen auch besondere Uhrwerksarchitekturen. Sie sind immer ein Hingucker für jeden Uhrenfreund, jedoch selten ein Freund des Konstrukteurs. Denn Mikrorotoren bringen aufgrund ihres geringen Durchmessers weniger Aufzugskraft mit. In hochpreisigen Uhren kann das mit schwerem Edelmetall wie Gold oder Platin teilweise ausgeglichen werden, allerdings zu erheblichen Kosten. Und wenn man dem Rotor mehr Höhe verleiht, um den kleineren Durchmesser auszugleichen, verliert das Werk den Vorteil der geringen Bauhöhe. Mehr Kompromiss als Optimum. Deshalb haben wir uns gegen einen Mikrorotor entschieden. Stattdessen haben wir die klassische Architektur eines Glashütter Uhrwerks so optimiert, dass unsere Werke nicht nur schön sind, sondern vor allem höchste Präzision und Energieeffizienz bieten. Und trotzdem sind sie besonders flach und gleichzeitig sehr robust.“
Die berühmte Frage – „Wer hat’s erfunden?“ – stammt aus den Ricola-Werbespots der 1990er-Jahre und suggeriert humorvoll, dass viele Dinge in der Schweiz ersonnen wurden. Neben dem Kräuterbonbon trifft dies auch auf den Mikrorotor beziehungsweise den Planetenrotor zu. Diese sprachliche Dualität verweist schon auf die Tatsache, dass bei der Beantwortung der Frage nach dem Erfinder zwei Protagonisten im Spiel sind.
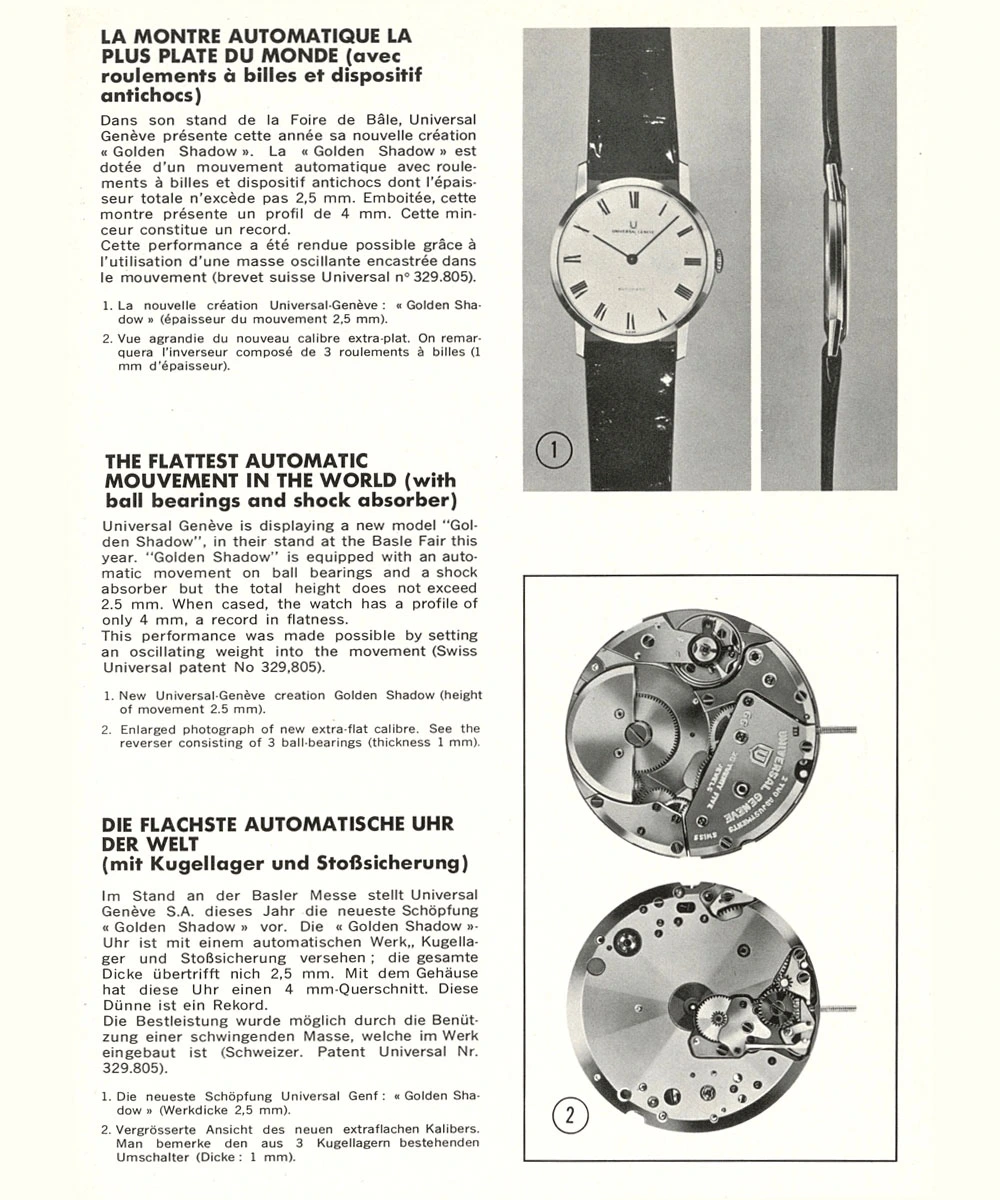
Eine gängige Annahme ist, dass die gerade wiederbelebte Marke Universal Genève als Erste den Mikrorotor präsentierte. Als innovative technische Lösung für möglichst flache Uhrwerke. Und somit für Uhren wie die in den Fünfzigerjahren beliebten Dress Watches. Am 27. Mai 1955 beantragte das Unternehmen ein entsprechendes Patent (Patentnr. CH329805).
Bis auf den Superlativ „Erste“ stimmt die Erzählung. Diese ist umso spannender, als dass UG seine jüngsten Automatik-Modelle allesamt nicht mit einem „echten“ Mikrorotor, sondern mit einem Dreiviertelrotor ausgestattet hat. Das wirft die Frage ob der Vor- und Nachteile des Mikrorotors auf. Doch dazu später mehr.
Zunächst zurück in die 1950er, als der Mikrorotor als technische Sensation gefeiert wurde. Eine, für die bereits elf Monate vor UG ein anderes Unternehmen am 21. Juni 1954 eine Patentanmeldung (Patentnr. CH329804) eingereicht hatte. Die Rede ist von der 1898 gegründeten Schweizer Firma Büren Watch Company.
Kreativer Kopf dahinter war der Chefkonstrukteur Hans Kocher, der an der Alternative zum Zentralrotorsystem gearbeitet hatte, das Automatikkaliber im Vergleich zu Handaufzugswerken deutlich dicker macht. Seine Lösung: Verkleinerung der Schwungmasse und Verlagerung in die Ebene des Werks – anstatt der Positionierung auf dem Werk. So simpel wie die Idee klang, so komplex war die Umsetzung angesichts von Werkdurchmessern um die 25 bis 30 Millimeter.

Credit © Chrono24
Doch es gelang und Büren nannte die in die Werksebene integrierte Schwungmasse Planetary Rotor. Erstmals verbaut wurde der Planetenrotor im Kaliber 1000 der Werkefamilie Super-Slender (englisch für superschlank). Die Markteinführung des 4,2 Millimeter flachen Werks in Serienuhren erfolgte ab 1957.
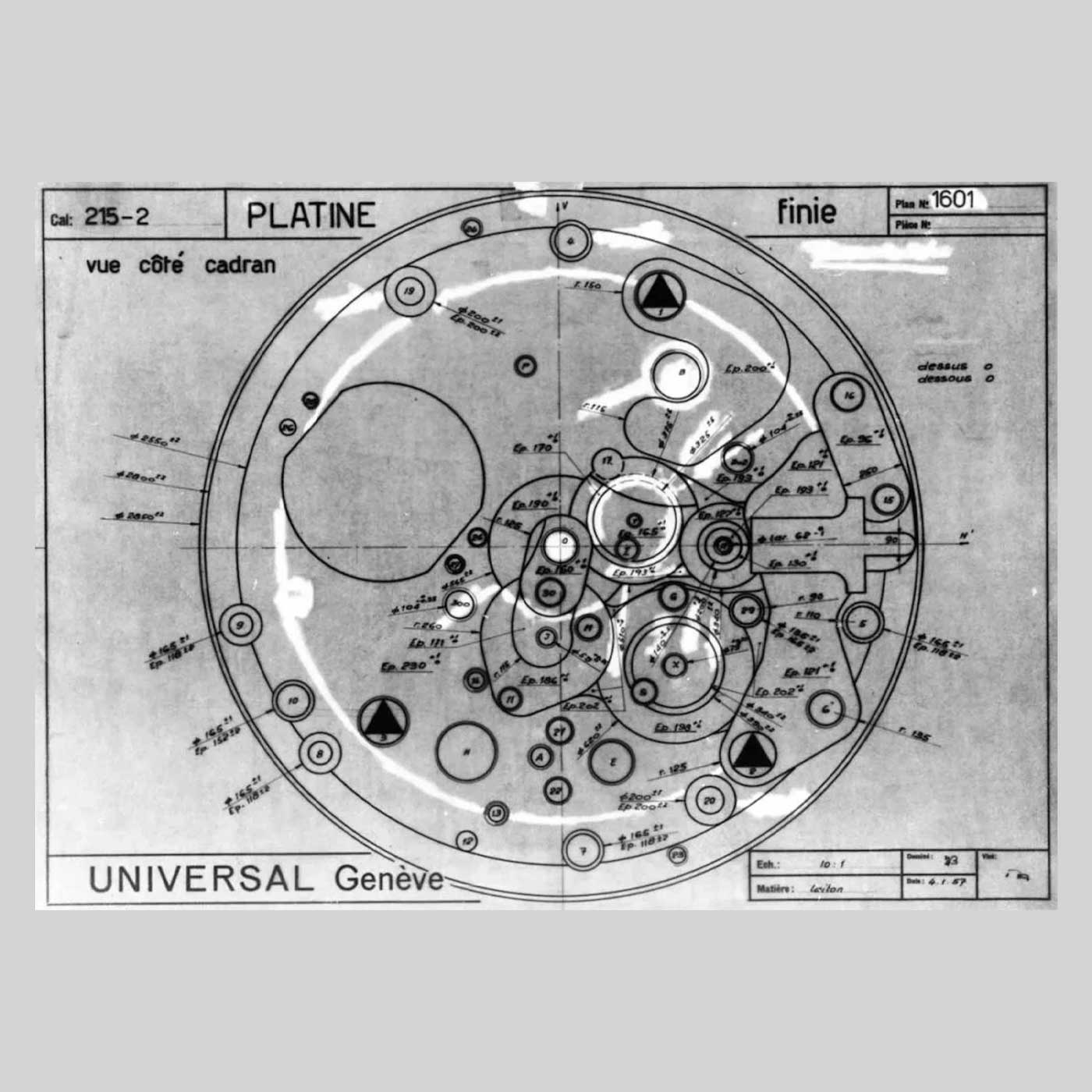
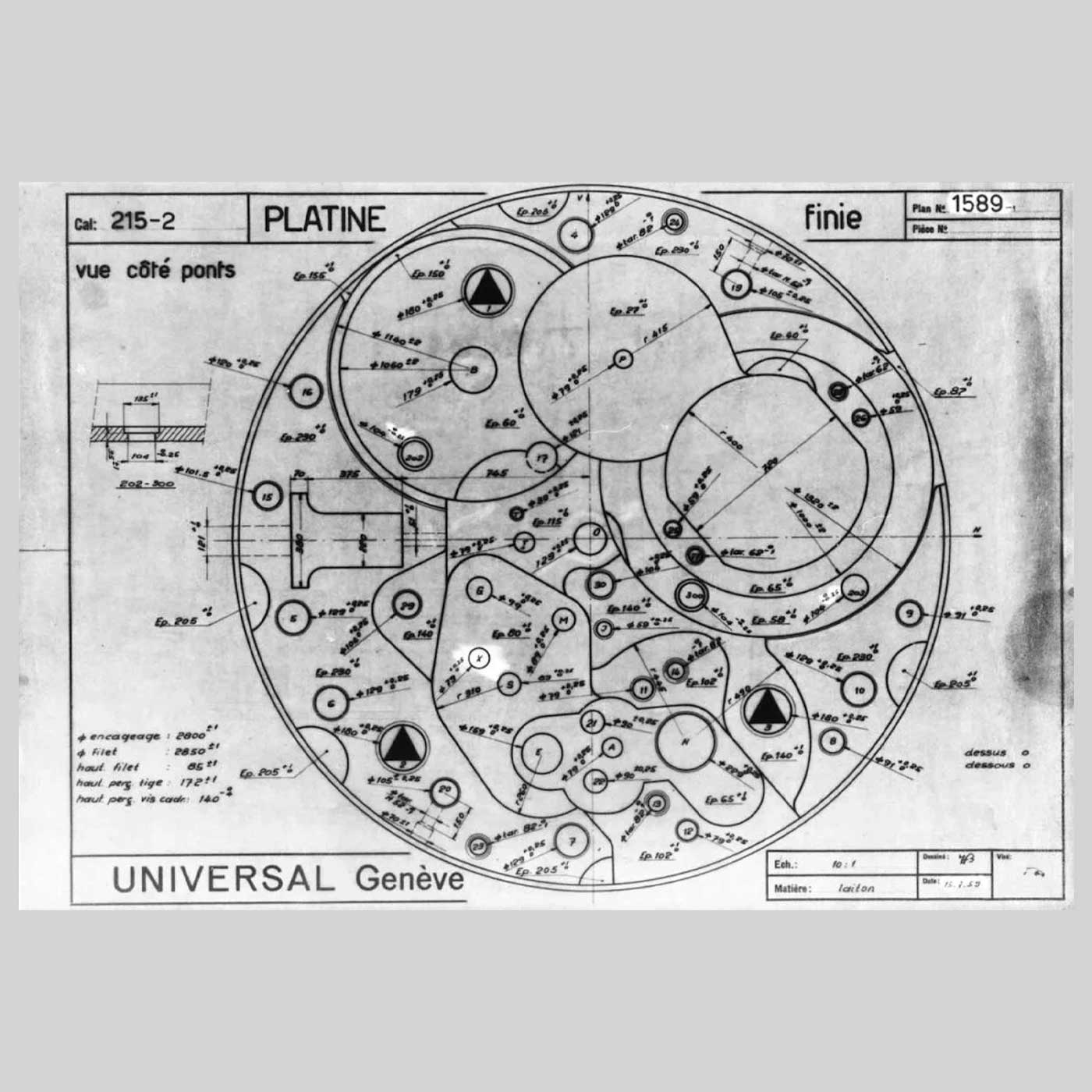
UG wählte bei der Patentanmeldung für sein funktional nahezu identisches System die Bezeichnung Microtor. Ein Kunstwort, zusammengesetzt aus den englischen Begriffen „micro“ für klein und „rotor“. Erster Einsatzort war das 4,1 Millimeter flache, 1958 eingeführte Kaliber 215, welches auch die ikonische Polerouter von UG antrieb.
Credit @ The Polerouter Reference Website
Fazit: Das Unternehmen Büren Watch hat zwar den technologischen Wettlauf gewonnen, UG prägt jedoch das Narrativ um den Mikrorotor bis heute nachhaltig. Und gab ihm seinen Namen.
Erwähnenswert ist dabei die Tatsache, dass beide Unternehmen unabhängig voneinander zu derselben Lösung gekommen waren. Während des anfänglichen Rechtsstreits musste UG allerdings „Patented Rights Pending“ auf die Werke gravieren und eine Lizenzgebühr in Höhe von vier Schweizer Franken pro Werk an Büren zahlen.
Credit @ watchguy.co
Typisch schweizerisch fand man einen Konsens und stellte am 18. Februar 1958 auf einer gemeinsamen Pressekonferenz im Hotel Des Bergues in Genf die innovative Technik des Mikrorotors vor.
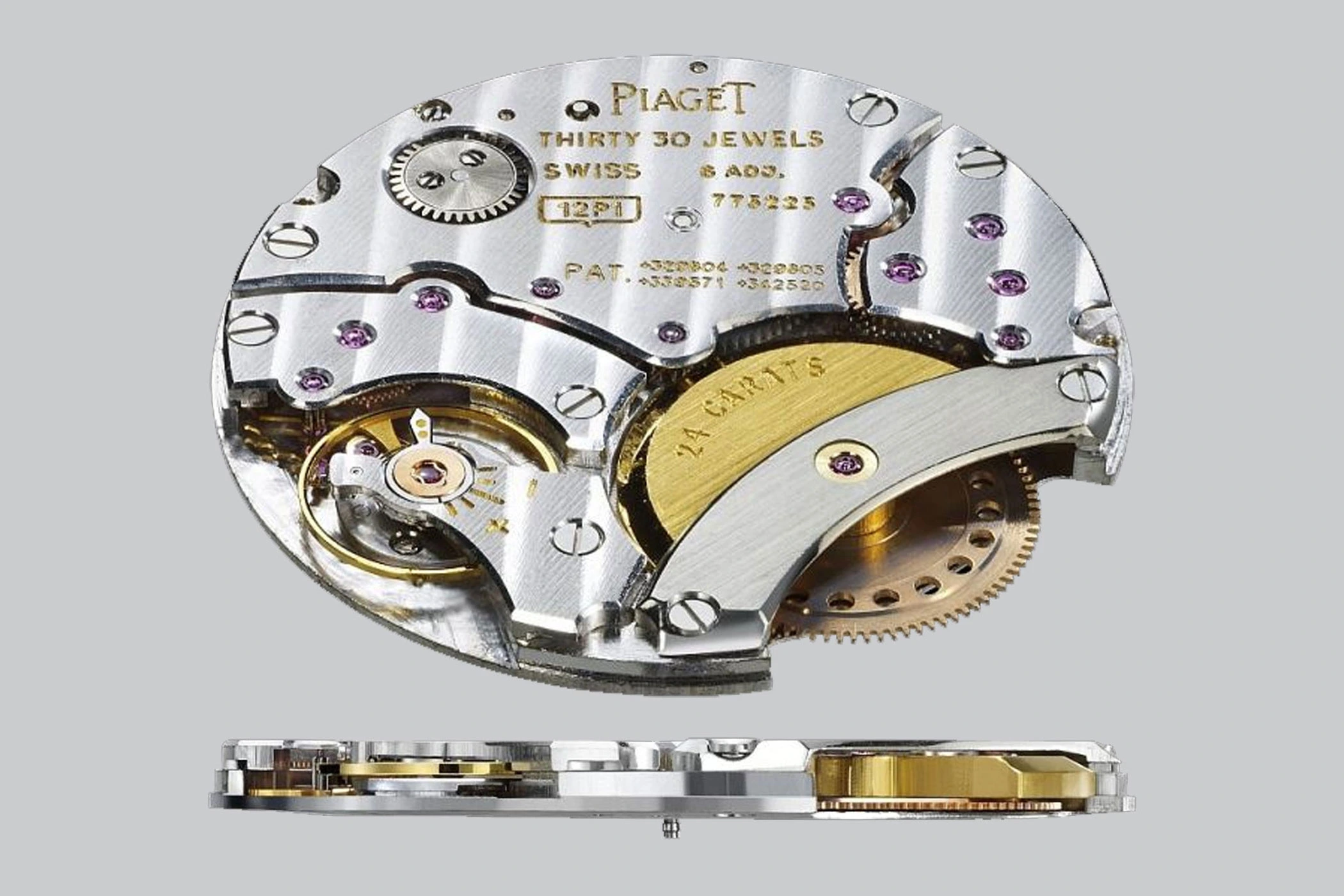
Büren hat zudem weitere Lizenzen an Marken wie IWC, Hamilton, Bulova, Baume & Mercier und Breitling vergeben. Und an Piaget. Die Manufaktur stellte 1960 das nur 2,3 Millimeter hohe Kaliber 12P vor, welches für die nächsten zwei Jahrzehnte als das flachste Automatikwerk in der Uhrenwelt galt. Eingraviert auf einer der Brücken fanden sich in den ersten Jahren die beiden Patentnummern von UG und Büren.
Büren wurde übrigens 1966 von Hamilton übernommen und war bei dem von TAG Heuer geleiteten Joint Venture zusammen mit Breitling und Dubois-Dépraz an der Entwicklung des Mikrorotor-Kalibers 11 (Chronomatic) beteiligt. Es war eines der ersten serienreifen automatischen Chronographenwerke und kombinierte einen Mikrorotor mit einem Chronographenmodul von Dubois-Dépraz. 1969 debütierte es unter anderem in der Monaco von TAG Heuer.
Lesen Sie hier unseren Artikel über die schönsten Uhren mit Mikrorotor 2026.











