Slim calibres, sophisticated movement design: the latest watches featuring micro-rotors from Bulgari, Chopard, Patek Philippe and others – the most exciting new releases of 2026.


Der Mikrorotor gilt als die eleganteste Form des automatischen Aufzugs – und zugleich als technischer Kompromiss. Seit dem Ende der 1950er-Jahre ermöglicht seine integrierte Konstruktion flachere Kaliber und einen freieren Blick auf das Uhrwerk. Ob Patek Philippe, Chopard oder Bulgari – zahlreiche Uhrenmanufakturen setzen derzeit verstärkt auf den Mikrorotor. Grund für einen analytischen Blick auf das kleine Kraftpaket im Automatikwerk.
The invention of the automatic movement was a milestone in the history of watchmaking. To this day, it is shrouded in the aura of a perpetual motion machine which – once set in motion – runs and runs and runs. Without any further external energy supply. That is, of course, not true.
Instead, kinetic energy – generated by the wearer’s wrist movements or a watch winder – ensures that the winding rotor stores this kinetic energy in the mainspring. Meanwhile, the escapement and balance wheel enable the controlled release of this energy to the gear train, which drives the hands and other functions and supplies them with power.
The winding rotor can take various forms, although it always operates on the same principle: transferring kinetic energy to the mainspring in the barrel.

The large central rotor, which rotates freely above the movement, is probably the most commonly used. The micro-rotor, integrated into the movement, was introduced in the 1950s and is currently very popular.

In terms of size, efficiency and an unobstructed view of the movement, the three-quarter rotor falls somewhere between these two variants.

And then there is the peripheral rotor. Here, a ring-shaped weight rotates on the outer edge of the movement, offering a completely unobstructed view of the movement. It also has a high moment of inertia, meaning it is highly efficient. Nevertheless, it is rarely used, as peripheral rotors are difficult to construct. It runs, so to speak, like a ring on a rail. Consequently, the bearing must be extremely precise and the ring must be guided very stably to prevent excessive friction. Even small tolerance errors can lead to significant problems.

As early as the late 18th century, watchmakers such as Louis Perrelet (1729–1826) and Abraham Louis Breguet (1747–1823) were experimenting with self-winding pocket watches; however, these remained rather sophisticated exceptions. This was possibly due to the fact that a pocket watch carried in a waistcoat or trouser pocket often receives very little movement, meaning that automatic winding is only of limited efficiency. Furthermore, one picks up a pocket watch several times a day anyway to check the time. Winding it by hand can, so to speak, be done at the same time.

Credit © Perrelet
A wristwatch is a different matter. Depending on what they are doing, people move their left arm up to tens of thousands of times a day. What’s more, people rarely take off their wristwatches; many don’t even remove them at night. Whilst a hand-wound watch has to be taken off regularly to be wound up, an automatic watch, conveniently, simply keeps running.
In 1923, watchmaker John Harwood (1893–1965) and Harry Cuts, his financier, filed a patent application in Switzerland for the invention of a self-winding wristwatch; the patent was granted on 1 September 1924 under number 106583.

Credit @ The British Museum
Although other watchmakers of the time were also developing automatic movements with a wide variety of winding systems for wristwatches, Harwood’s concept is regarded as the foundation of the global success story of the automatic wristwatch: the positioning of the rotor in the form of a circular segment at the centre of the movement. In Harwood’s design, this oscillated left and right with the movement of the arm and transferred the kinetic energy to the mainspring. At the end of its travel, it struck small springs or buffers, known as bumpers.
Rolex played a key role in the subsequent rapid development of the automatic movement. The brand further developed Harwood’s bumper principle and, in 1931, introduced a freely rotating rotor that could turn through 360 degrees, thereby winding more efficiently. Rolex called this patented system the Perpetual Rotor. To this day, the rotor in modern automatic watches is fundamentally based on this principle.

The widespread adoption of automatic wristwatches is now generally considered to have begun in the late 1940s or early 1950s. This period was marked by hundreds of patent applications filed within just a few years, reflecting the quest for the ideal automatic winding mechanism.
Always in the spotlight: the rotor. Or, to be more precise: the central rotor. For, despite its efficiency, it stood in the way of the growing demand for flatter and more elegant watches, as it is mounted on top of the actual movement. The solution: the integrated micro-rotor.
From the late 1950s onwards, the micro-rotor made its debut in the world of automatic wristwatches. Whilst the classic central rotor requires a large oscillating system, which necessitates a second functional level above the base movement, the micro-rotor is integrated into the movement itself.
In an era of glass bases, it also allows an unobstructed view of much of the movement, whereas a central rotor largely obscures it. Unless, of course, it is open-worked.
The following applies to all variants: they must be as heavy as possible, allow for free and easy movement, and be mounted in such a way as to withstand impacts.
However, simply miniaturising the rotor is not enough. For apart from the fact that space must first be made in the movement to accommodate it, one mechanical principle poses the greatest challenge for a micro-rotor: the moment of inertia. The higher this is, the more efficient the rotational movement of an automatic movement’s rotor.

The Swiss manufacturer Parmigiani Fleurier frequently uses micro-rotors and highlights their greater design complexity: “The reduced rotor diameter requires precise calibration of inertia, winding efficiency and energy flow throughout the entire automatic module to ensure efficiency and practicality comparable to those of central rotor systems.”
The key factor is the moment of inertia. This increases with the radius of gyration – that is, the distance between the axis of rotation and the mass. This means that the larger the rotor, the higher the efficiency. To compensate for this whilst reducing the size, as much mass as possible is concentrated at the outer edge. For this reason, micro-rotors are often fitted with a heavy outer ring, made, for example, of gold, platinum or tungsten.

The latter is a key advantage of modern micro-rotor systems over their historical predecessors, as Parmigiani Fleurier explains:
“The innovation lies in the use of high-density materials such as platinum or gold alloys, which, despite their compact dimensions, provide greater inertia and thus make the lift significantly more efficient. Added to this are optimised bearing and rotor geometries, as well as a consistent reduction in friction losses throughout the automatic module. At the same time, modern movement architectures allow for a much more integrated design, enabling the creation of extremely flat calibres, whilst energy efficiency has been significantly stabilised and improved compared to earlier designs – albeit always within the physical limits of this system.”
It is commonly believed that a micro-rotor represents a compromise between height and physical efficiency. But what does efficiency actually mean in this context? In short: a central rotor winds the mainspring of an automatic watch more quickly than a micro-rotor.
This can affect the actual power reserve achieved. If we take two watches with a maximum theoretical power reserve of 70 hours, one of which has a very efficient rotor and the other a less efficient one, the following applies: the first watch will wind fully quite quickly when worn normally, whilst the other may never reach full mainspring tension and thus the maximum power reserve.

Particularly in high-frequency watches, a central rotor can therefore be a definite advantage when it comes to power reserve. However, the difference in efficiency between a central rotor and a modern micro-rotor is rapidly diminishing. This is because movement specialists are constantly working to optimise winding efficiency. This involves fine-tuning the rotor geometry, bearing technology and minimising friction within the automatic module in order to compensate as effectively as possible for the physical limitations of compact oscillating weights.
The famous question – “Who invented it?” – originates from the Ricola adverts of the 1990s and playfully suggests that many things were conceived in Switzerland. As well as the herbal sweet, this also applies to the micro-rotor or planetary rotor. This linguistic duality already points to the fact that, when answering the question of who invented it, two protagonists are involved.
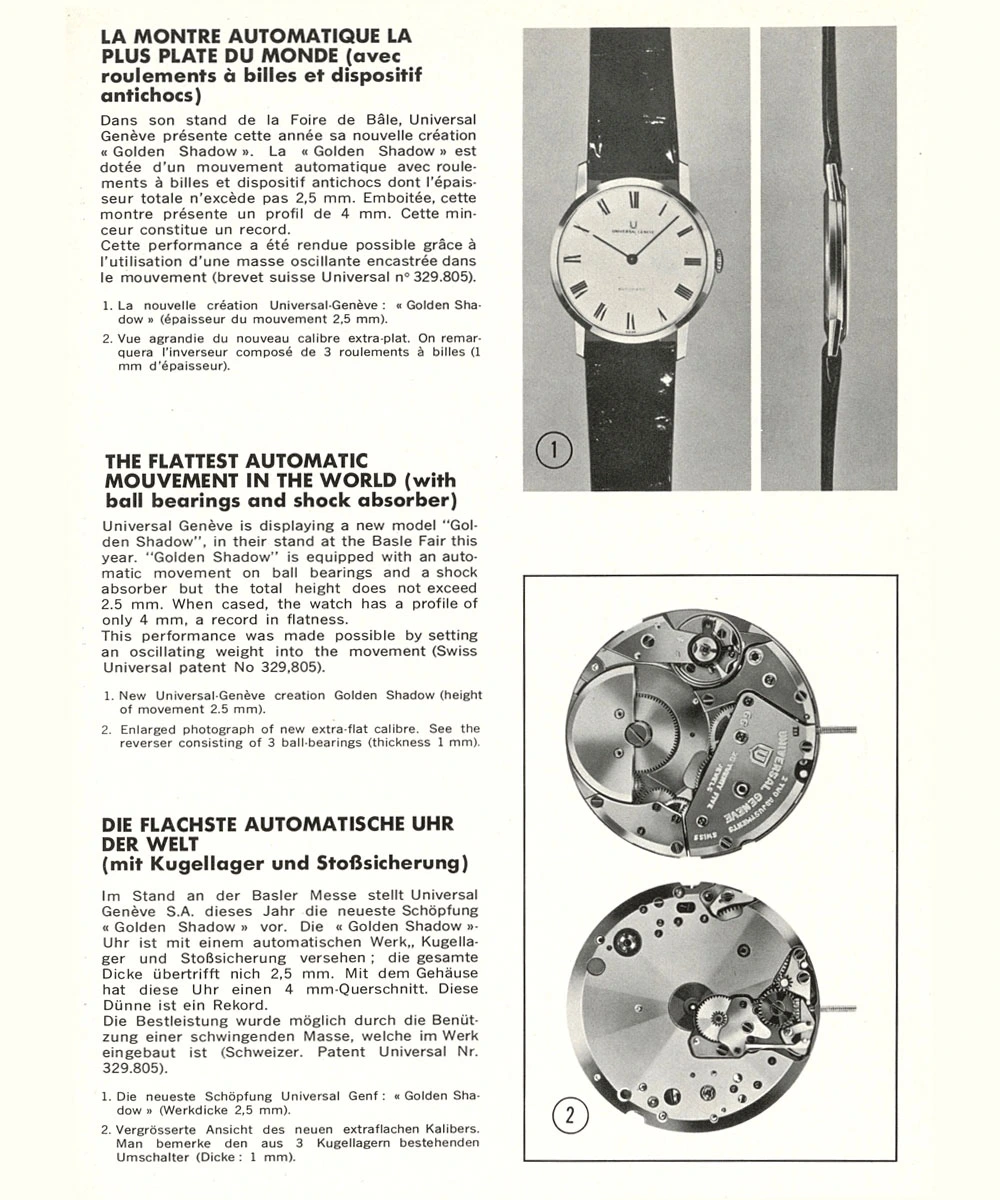
It is commonly believed that the recently revived Universal Genève brand was the first to introduce the micro-rotor. This was an innovative technical solution designed to create movements that were as flat as possible. And thus for watches such as the dress watches that were popular in the 1950s. On 27 May 1955, the company filed a patent for this invention (Patent No. CH329805).
Apart from the superlative “first”, the story is true. This makes it all the more intriguing given that UG has fitted all its latest automatic models not with a “genuine” micro-rotor, but with a three-quarter rotor. This raises the question of the pros and cons of the micro-rotor. But more on that later.
Let’s start by going back to the 1950s, when the micro-rotor was hailed as a technical sensation. A sensation for which another company had already filed a patent application (Patent No. CH329804) on 21 June 1954 – eleven months before UG. We are talking about the Swiss firm Büren Watch Company, founded in 1898.
The creative mind behind this was chief designer Hans Kocher, who had been working on an alternative to the central rotor system, which makes automatic calibres significantly thicker than hand-wound movements. His solution: to reduce the size of the oscillating weight and position it within the movement itself – rather than on top of it. As simple as the idea sounded, its implementation was complex given movement diameters of around 25 to 30 millimetres.

Credit © Chrono24
However, he succeeded, and Büren named the oscillating weight integrated into the movement the ‘Planetary Rotor’. The Planetary Rotor was first fitted in the Calibre 1000 of the Super-Slender movement family. The 4.2-millimetre-thick movement was introduced into production watches from 1957 onwards.
When filing the patent for its functionally almost identical system, UG chose the name Microtor. A coined term, it is a combination of the English words ‘micro’ (meaning small) and ‘rotor’. It was first used in the 4.1-millimetre-thick Calibre 215, introduced in 1958, which also powered UG’s iconic Polerouter.
Credit @ The Polerouter Reference Website
Conclusion: Whilst Büren Watch may have won the technological race, UG continues to shape the narrative surrounding the micro-rotor to this day. And it was UG that gave it its name.
It is worth noting that both companies had arrived at the same solution independently of one another. During the initial legal dispute, however, UG was required to engrave ‘Patented Rights Pending’ on the works and pay Büren a licence fee of four Swiss francs per work.

Credit @ watchguy.co
In typical Swiss fashion, a consensus was reached, and on 18 February 1958, the innovative micro-rotor technology was unveiled at a joint press conference at the Hotel Des Bergues in Geneva.
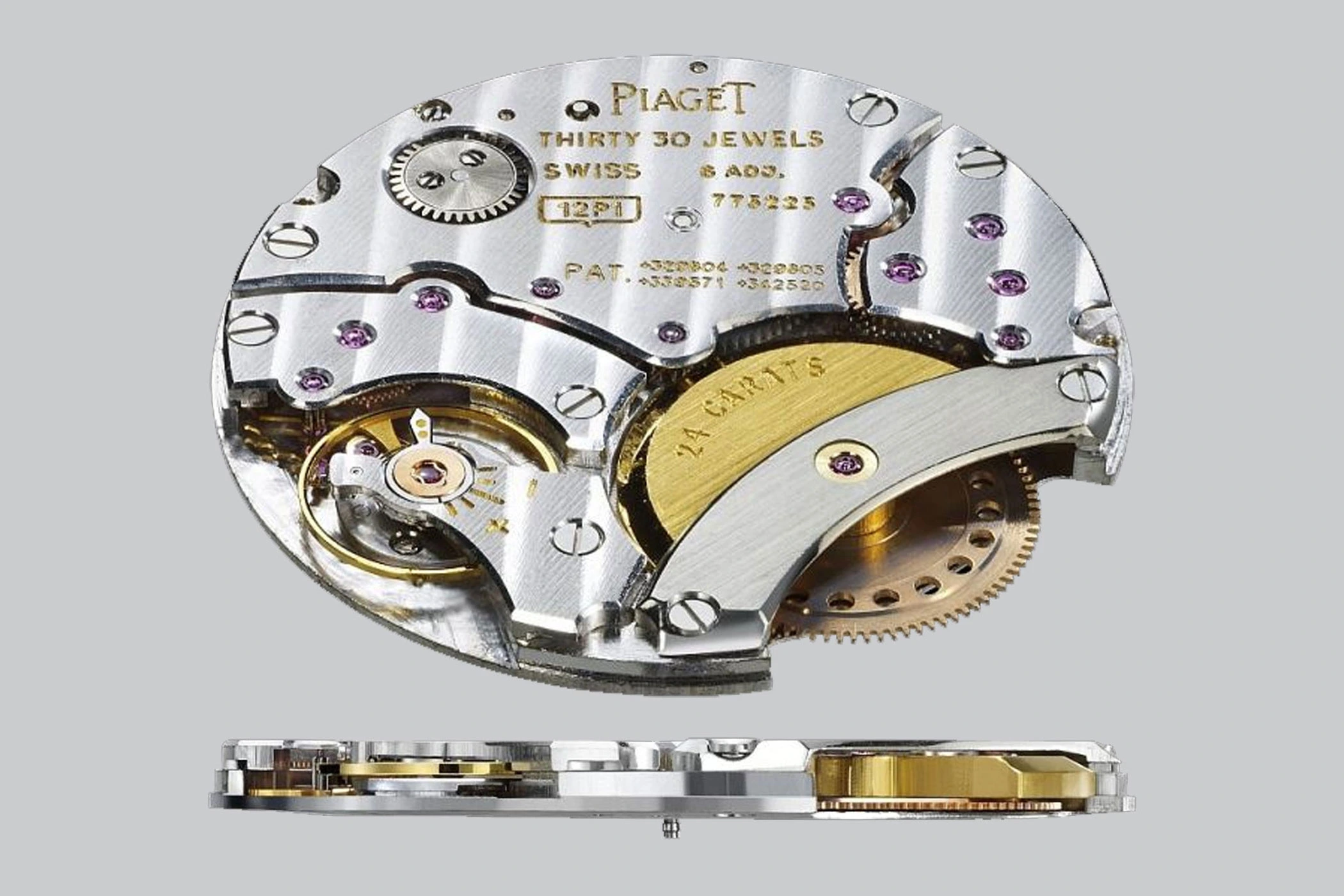
Büren has also granted licences to brands such as IWC, Hamilton, Bulova, Baume & Mercier and Breitling. And to Piaget. In 1960, the manufacture introduced the Calibre 12P, just 2.3 millimetres thick, which was regarded as the flattest automatic movement in the watchmaking world for the next two decades. In the early years, the two patent numbers of UG and Büren were engraved on one of the bridges.
Incidentally, Büren was taken over by Hamilton in 1966 and, as part of the joint venture led by TAG Heuer, was involved in the development of the Microrotor Calibre 11 (Chronomatic) alongside Breitling and Dubois-Dépraz. It was one of the first production-ready automatic chronograph movements and combined a microrotor with a chronograph module from Dubois-Dépraz. In 1969, it made its debut in, amongst others, the TAG Heuer Monaco.
Read here our article on the best micro-rotor watches of 2026.











